Introduction to Virtual Simulation Data
The development of physical AI is being driven by virtual simulation data across corporate environments. Initiatives like Ai2’s MolmoBot are leading the charge. Historically, instructing hardware to interact with the real world has relied on expensive and manually-collected demonstrations.
However, technology providers are now building generalist manipulation agents that frame extensive real-world training as the basis for these systems.
For instance, projects like DROID include 76,000 teleoperated trajectories gathered across 13 institutions, representing roughly 350 hours of human effort.
Challenges in Physical AI Development
Google DeepMind’s RT-1 required 130,000 episodes collected over 17 months by human operators. This reliance on proprietary, manual data collection inflates research budgets and concentrates capabilities within a small group of well-resourced industrial laboratories.
Meanwhile, researchers from the Allen Institute for AI (Ai2) offer a different economic model with MolmoBot, an open robotic manipulation model suite trained entirely on synthetic information.
Benefits of Virtual Simulation Data
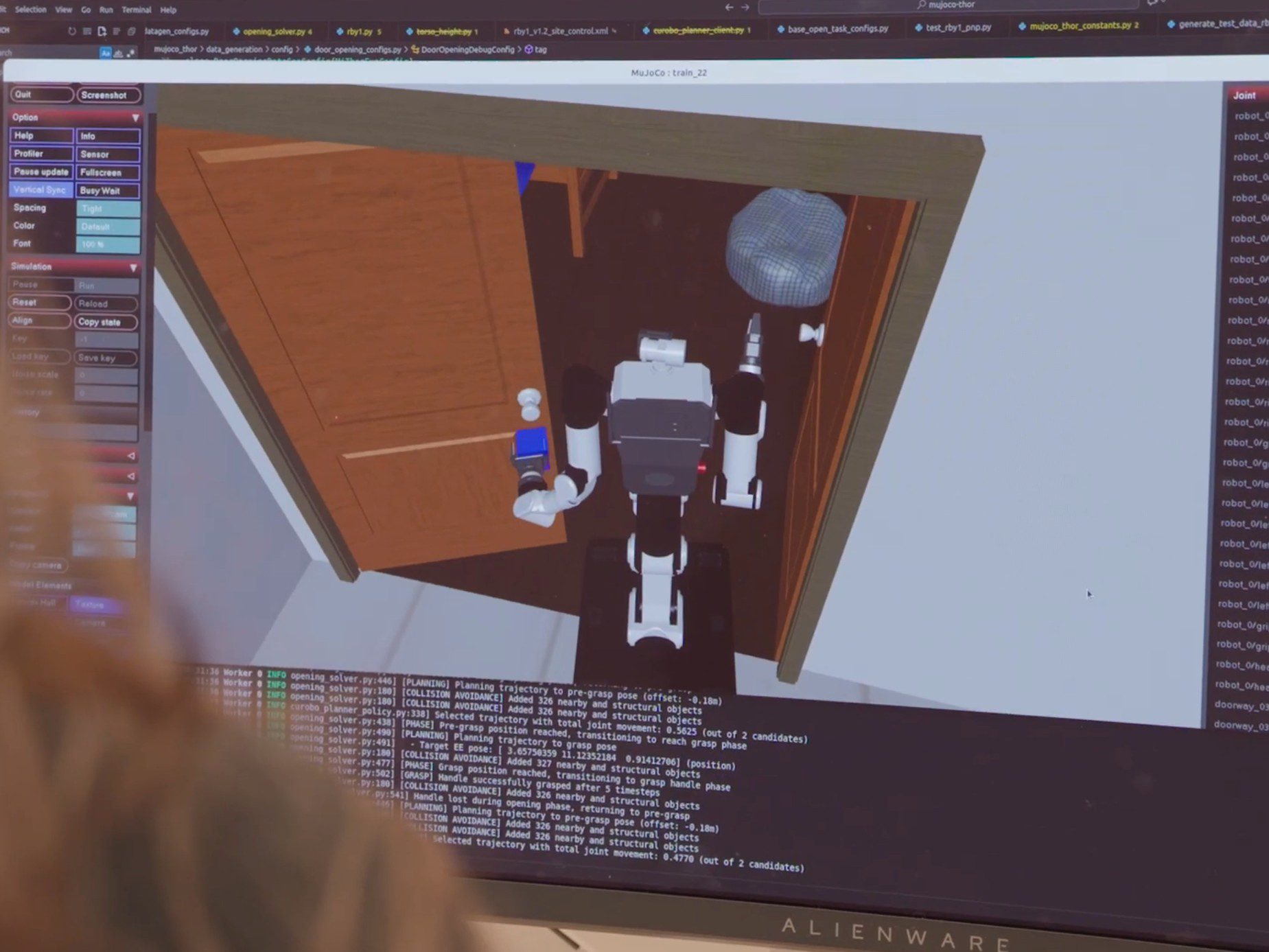
By generating trajectories procedurally within a system called MolmoSpaces, the team bypasses the need for human teleoperation.
The accompanying dataset, MolmoBot-Data, contains 1.8 million expert manipulation trajectories. This collection was produced by combining the MuJoCo physics engine with aggressive domain randomisation, varying objects, viewpoints, lighting, and dynamics.
Generating Virtual Simulation Data
Using 100 Nvidia A100 GPUs, the pipeline created roughly 1,024 episodes per GPU-hour, equating to over 130 hours of robot experience for every hour of wall-clock time.
Additionally, this represents nearly four times the data throughput, directly impacting project return on investment by accelerating deployment cycles.
Hardware Flexibility with Ai2’s MolmoBot
The MolmoBot suite includes three distinct policy classes evaluated on two platforms: the Rainbow Robotics RB-Y1 mobile manipulator, and the Franka FR3 tabletop arm.
For edge computing environments where resources are constrained, the researchers provide MolmoBot-SPOC, a lightweight transformer policy with fewer parameters.
Conclusion and Future Directions
In conclusion, virtual simulation data is revolutionizing the development of physical AI. With initiatives like Ai2’s MolmoBot, we can expect to see significant advancements in the field.
Therefore, it is essential to continue investing in virtual simulation data to drive innovation and progress.
FAQs
- What is virtual simulation data, and how is it used in physical AI development? Virtual simulation data is used to train AI models in a simulated environment, reducing the need for manual data collection.
- How does Ai2’s MolmoBot contribute to the development of physical AI? Ai2’s MolmoBot is an open robotic manipulation model suite trained entirely on synthetic information, offering a different economic model for physical AI development.
- What are the benefits of using virtual simulation data in physical AI development? The benefits include reduced costs, increased data throughput, and improved hardware flexibility.
- How does the MolmoBot suite evaluate policy classes? The MolmoBot suite evaluates policy classes on two platforms: the Rainbow Robotics RB-Y1 mobile manipulator, and the Franka FR3 tabletop arm.
- What is the future of physical AI development with virtual simulation data? The future of physical AI development with virtual simulation data is promising, with significant advancements expected in the field.